Hi, I'm S Hari Preetham.From Algorithms
to Actuators.
Building precision systems from first principles.
About Me
Data-driven Mechanical Engineer focused on precision mechatronics and control systems for Robotics/Automation Platforms. Experienced in developing sensor fusion pipelines, 3D localization systems, and real-time control algorithms for bridging mechanical domain knowledge with software engineering for intelligent physical systems.
👨🏻💻 Currently Working on....
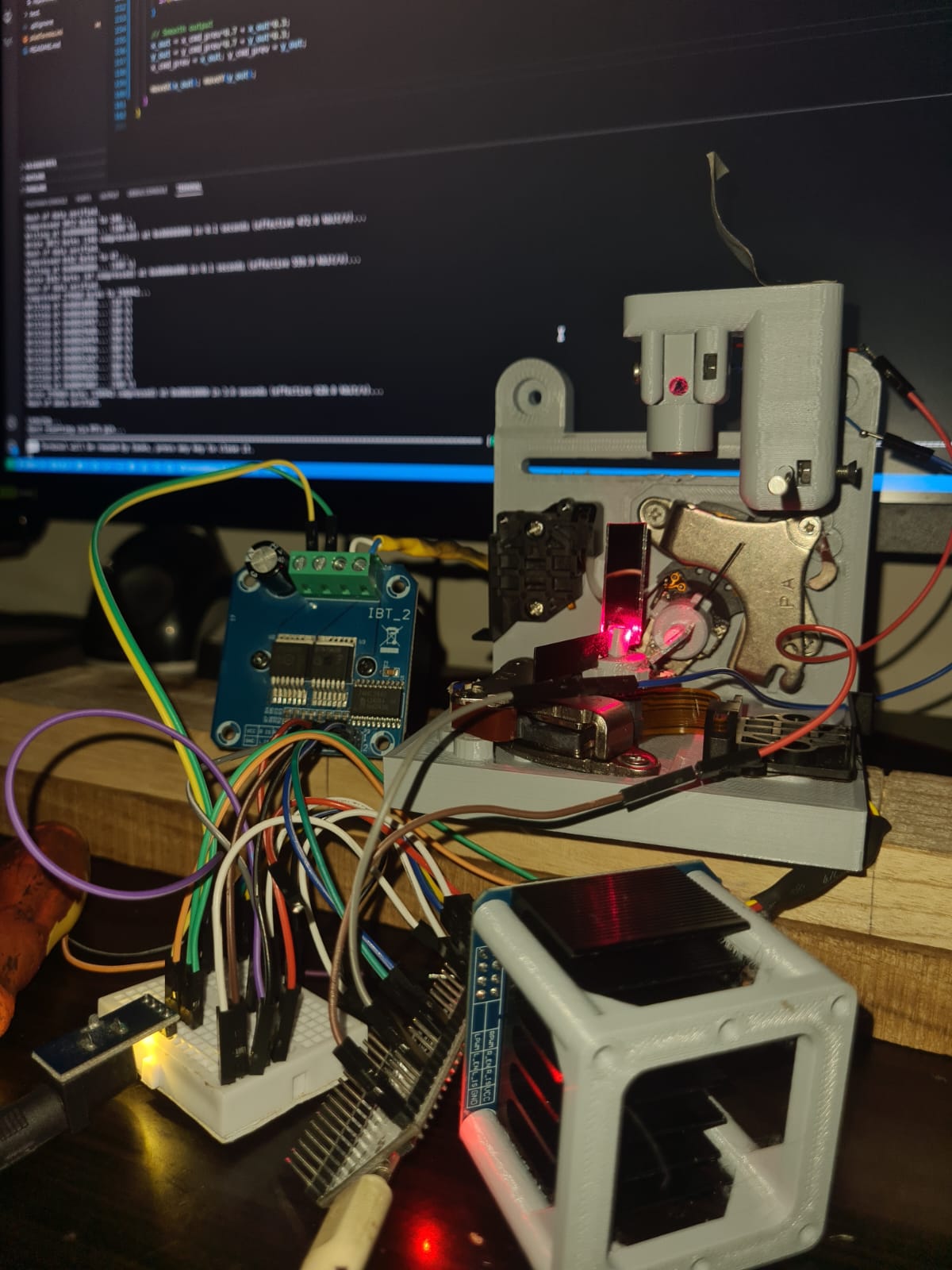
Real-Time Precision acutation for laser steering application with active vibration compensation.
This project developed a real-time, active line-of-sight stabilization and pointing system for precision laser beam steering applications, such as Unmanned Combat Air Systems (UCAS) or agricultural laser weeding. This is achieved by using a custom 2-axis Galvo scanner and a YOLOv8/DeepSORT vision pipeline to detect and track targets in real-time. The system utilizes advanced control algorithms (PID/LQR) and sensor fusion (IMU + Camera) to actively counter external vibrations and maintain sub-milliradian precision pointing. A custom OpenGL simulation modeled kinematics for initial algorithm development. The final control system integrity is ensured via a Hardware-in-the-Loop (HIL) testing framework, facilitating a robust simulation-to-real transfer.
👨🏻💻 Most Recent Project
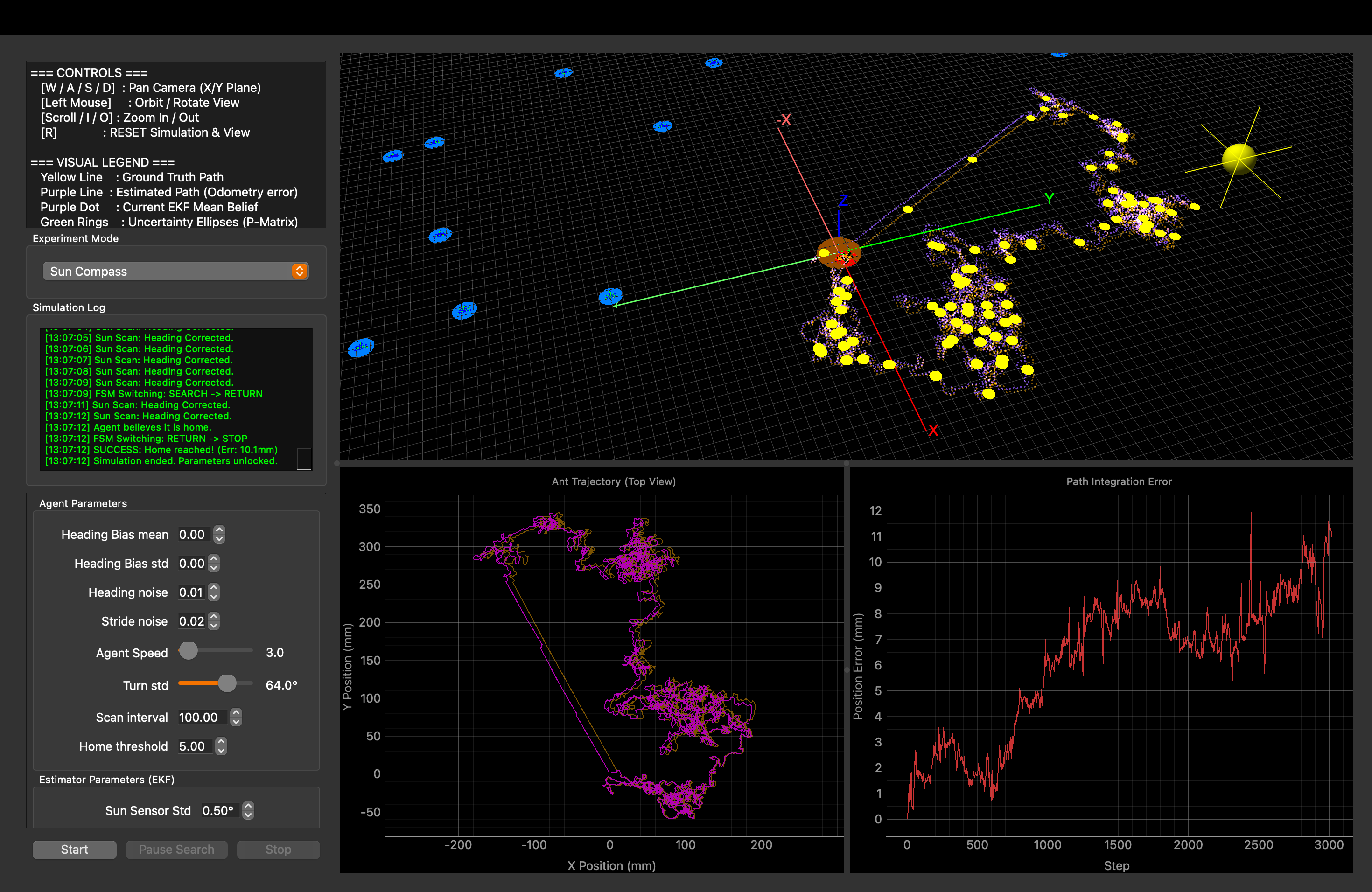
Bio-Inspired Navigation Simulation for Feature-less Environments.
Dec 2025Visual SLAM fails in featureless warehouses because every aisle looks the same (perceptual aliasing). Built this simulation to validate a solution inspired by Cataglyphis ants: using sparse global orientation cues (like ceiling lights) to correct sensor drift. Implemented an EKF state estimator to fuse noisy odometry with spectral compass readings, propagating a 3x3 covariance matrix to track uncertainty and model Gaussian sensor noise. Made the simulation RL-ready using Gymnasium and tested with PPO agents to learn navigation policies that exploit the bio-mimetic heading correction. Achieved an 81% reduction in terminal error compared to blind dead-reckoning, proving that bio-mimetic heading correction enables precise, infrastructure-free navigation where traditional methods struggle. Built from scratch using NumPy for vector math and PyQtGraph+OpenGL for 3D visualization.
⚡ Technical Skills
Hardware & Electronics
Firmware & Embedded
Robotics Software
Theory & Control
📚 Input / Output
Influences and current reading list.
- Robotics,Vision and ControlPeter CorkeTextbook
- Kalman FilterResearch PapersCurrent read
🚀 Status
CURRENTLY BUILDING
Laser weeding robot (Active Vibration Compensation)
OBSESSED WITH
Control theory, Starship, Sub-mm precision